 T-297, formerly the Latvian Virsaitis, which was shipwrecked on 3 December 1941 in the [1] Sonar effigy of the Soviet Navy minesweeper, once the Latvian, which was shipwrecked on 3 December 1941 in the Gulf of Finland Sonar ( sound navigation and ranging ) is a technique that uses legal propagation ( normally submerged, as in submarine navigation ) to navigate, measure distances ( ranging ), communicate with or detect objects on or under the coat of the water, such as other vessels. [ 2 ] Two types of technology share the name “ sonar ” : passive sonar is basically listening for the sound made by vessels ; active sonar is emitting pulses of sounds and listening for echoes. Sonar may be used as a entail of acoustic placement and of measurement of the repeat characteristics of “ targets ” in the water. acoustic placement in air out was used before the introduction of radar. Sonar may besides be used for automaton navigation, [ 3 ] and SODAR ( an upward-looking in-air sonar ) is used for atmospheric investigations. The term sonar is besides used for the equipment used to generate and receive the sound. The acoustic frequencies used in sonar systems vary from very low ( infrasonic ) to highly high ( supersonic ). The study of subaqueous sound is known as submerged acoustics or hydroacoustics.
T-297, formerly the Latvian Virsaitis, which was shipwrecked on 3 December 1941 in the [1] Sonar effigy of the Soviet Navy minesweeper, once the Latvian, which was shipwrecked on 3 December 1941 in the Gulf of Finland Sonar ( sound navigation and ranging ) is a technique that uses legal propagation ( normally submerged, as in submarine navigation ) to navigate, measure distances ( ranging ), communicate with or detect objects on or under the coat of the water, such as other vessels. [ 2 ] Two types of technology share the name “ sonar ” : passive sonar is basically listening for the sound made by vessels ; active sonar is emitting pulses of sounds and listening for echoes. Sonar may be used as a entail of acoustic placement and of measurement of the repeat characteristics of “ targets ” in the water. acoustic placement in air out was used before the introduction of radar. Sonar may besides be used for automaton navigation, [ 3 ] and SODAR ( an upward-looking in-air sonar ) is used for atmospheric investigations. The term sonar is besides used for the equipment used to generate and receive the sound. The acoustic frequencies used in sonar systems vary from very low ( infrasonic ) to highly high ( supersonic ). The study of subaqueous sound is known as submerged acoustics or hydroacoustics.
Reading: Sonar – Wikipedia
The inaugural recorded use of the technique was by Leonardo district attorney Vinci in 1490 who used a tube inserted into the water to detect vessels by ear. [ 4 ] It was developed during World War I to counter the growing threat of submarine war, with an functional passive voice sonar organization in use by 1918. [ 2 ] Modern active sonar systems use an acoustic transducer to generate a healthy wave which is reflected from target objects. [ 2 ]
history
Although some animals ( dolphins, bats, some shrews, and others ) have used sound for communication and object detection for millions of years, use by humans in the body of water is initially recorded by Leonardo district attorney Vinci in 1490 : a tube inserted into the body of water was said to be used to detect vessels by placing an ear to the tube. [ 4 ] In the late nineteenth century an submerged bell was used as an accessory to lighthouses or lightships to provide warning of hazards. [ 5 ] The use of heavy to “ echo-locate ” submerged in the lapp way as bats use sound for aerial navigation seems to have been prompted by the Titanic disaster of 1912. [ 6 ] The worldly concern ‘s first patent for an subaqueous echo-ranging device was filed at the british Patent Office by English meteorologist Lewis Fry Richardson a month after the bury of Titanic, [ 7 ] and a german physicist Alexander Behm obtained a patent for an echo sounder in 1913. [ 8 ] The Canadian engineer Reginald Fessenden, while working for the Submarine Signal Company in Boston, Massachusetts, built an experimental system beginning in 1912, a system later tested in Boston Harbor, and last in 1914 from the U.S. Revenue Cutter Miami on the Grand Banks off Newfoundland. [ 7 ] [ 9 ] In that screen, Fessenden demonstrated depth sound, submerged communications ( Morse code ) and echo range ( detecting an iceberg at a 2-mile ( 3.2 kilometer ) stove ). [ 10 ] [ 11 ] The “ Fessenden oscillator “, operated at about 500 Hz frequency, was ineffective to determine the bear of the iceberg due to the 3-metre wavelength and the small dimension of the transducer ‘s radiating face ( less than 1⁄3 wavelength in diameter ). The ten Montreal -built british H-class submarines launched in 1915 were equipped with Fessenden oscillators. [ 12 ] During World War I the necessitate to detect submarines prompted more research into the use of sound. The british made early use of submerged listening devices called hydrophones, while the french physicist Paul Langevin, working with a russian immigrant electric engineer Constantin Chilowsky, worked on the development of active sound devices for detecting submarines in 1915. Although piezoelectric and magnetostrictive transducers belated superseded the electrostatic transducers they used, this work influenced future designs. lightweight sound-sensitive credit card film and character optics have been used for hydrophones, while Terfenol-D and PMN ( moderate magnesium niobate ) have been developed for projectors .
sonar
 ASDIC display unit of measurement from around 1944 In 1916, under the british Board of Invention and Research, canadian physicist Robert William Boyle took on the active agent voice detection project with A. B. Wood, producing a prototype for testing in mid-1917. This work for the Anti-Submarine Division of the british Naval Staff was undertaken in farthermost privacy, and used quartz piezoelectric crystals to produce the world ‘s foremost hardheaded subaqueous active sound detection apparatus. To maintain privacy, no mention of sound experiment or quartz was made – the word used to describe the early work ( “ supersonics ” ) was changed to “ ASD ” ics, and the quartz glass corporeal to “ ASD ” ivite : “ ASD ” for “ Anti-Submarine division ”, hence the british acronym ASDIC. In 1939, in reply to a wonder from the Oxford English Dictionary, the admiralty made up the narrative that it stood for “ Allied Submarine Detection Investigation Committee ”, and this is even widely believed, [ 13 ] though no committee bearing this identify has been found in the Admiralty archives. [ 14 ] By 1918, Britain and France had built prototype active systems. The british tested their sonar on HMS Antrim in 1920 and started production in 1922. The 6th Destroyer Flotilla had ASDIC-equipped vessels in 1923. An anti-submarine school HMS Osprey and a prepare flotilla of four vessels were established on Portland in 1924. By the outbreak of World War II, the Royal Navy had five sets for unlike surface embark classes, and others for submarines, incorporated into a complete anti-submarine organization. The effectiveness of early on ASDIC was hampered by the use of the depth charge as an anti-submarine weapon. This required an assail vessel to pass over a submerged contact before dropping charges over the stern, resulting in a personnel casualty of ASDIC contact in the moments leading up to attack. The hunter was efficaciously firing blind, during which prison term a submarine air force officer could take evasive natural process. This situation was remedied with modern tactics and fresh weapons. The tactical improvements developed by Frederic John Walker included the creeping fire. Two anti-submarine ships were needed for this ( normally sloops or corvettes ). The “ target embark ” tracked the target submarine on ASDIC from a side about 1500 to 2000 yards behind the submarine. The second embark, with her ASDIC turned off and running at 5 knots, started an attack from a position between the directing transport and the target. This attack was controlled by radio telephone from the directing embark, based on their ASDIC and the range ( by rangefinder ) and charge of the attacking transport. a soon as the depth charges had been released, the attacking ship left the immediate area at full accelerate. The directing ship then entered the aim area and besides released a radiation pattern of depth charges. The humble speed of the access meant the submarine could not predict when depth charges were going to be released. Any evasive legal action was detected by the directing transport and steering orders to the attacking ship given accordingly. The broken accelerate of the attack had the advantage that the german acoustic torpedo was not effective against a warship travelling then lento. A magnetic declination of the creeping attack was the “ plaster ” attack, in which three attacking ships working in a close line abreast were directed over the target by the directing ship. [ 15 ] The newly weapons to deal with the ASDIC blind spot were “ ahead-throwing weapons ”, such as Hedgehogs and subsequently Squids, which projected warheads at a target ahead of the attacker and still in ASDIC contact. These allowed a individual escort to make better aimed attacks on submarines. Developments during the war resulted in british ASDIC sets that used several unlike shapes of glow, continuously covering blind spots. late, acoustic torpedoes were used. early in World War II ( September 1940 ), british ASDIC technology was transferred for exempt to the United States. Research on ASDIC and submerged heavy was expanded in the UK and in the US. many raw types of military voice detection were developed. These included sonobuoys, first developed by the british in 1944 under the codename High Tea, dipping/dunking sonar and mine -detection sonar. This exploit formed the basis for post-war developments related to countering the nuclear submarine .
ASDIC display unit of measurement from around 1944 In 1916, under the british Board of Invention and Research, canadian physicist Robert William Boyle took on the active agent voice detection project with A. B. Wood, producing a prototype for testing in mid-1917. This work for the Anti-Submarine Division of the british Naval Staff was undertaken in farthermost privacy, and used quartz piezoelectric crystals to produce the world ‘s foremost hardheaded subaqueous active sound detection apparatus. To maintain privacy, no mention of sound experiment or quartz was made – the word used to describe the early work ( “ supersonics ” ) was changed to “ ASD ” ics, and the quartz glass corporeal to “ ASD ” ivite : “ ASD ” for “ Anti-Submarine division ”, hence the british acronym ASDIC. In 1939, in reply to a wonder from the Oxford English Dictionary, the admiralty made up the narrative that it stood for “ Allied Submarine Detection Investigation Committee ”, and this is even widely believed, [ 13 ] though no committee bearing this identify has been found in the Admiralty archives. [ 14 ] By 1918, Britain and France had built prototype active systems. The british tested their sonar on HMS Antrim in 1920 and started production in 1922. The 6th Destroyer Flotilla had ASDIC-equipped vessels in 1923. An anti-submarine school HMS Osprey and a prepare flotilla of four vessels were established on Portland in 1924. By the outbreak of World War II, the Royal Navy had five sets for unlike surface embark classes, and others for submarines, incorporated into a complete anti-submarine organization. The effectiveness of early on ASDIC was hampered by the use of the depth charge as an anti-submarine weapon. This required an assail vessel to pass over a submerged contact before dropping charges over the stern, resulting in a personnel casualty of ASDIC contact in the moments leading up to attack. The hunter was efficaciously firing blind, during which prison term a submarine air force officer could take evasive natural process. This situation was remedied with modern tactics and fresh weapons. The tactical improvements developed by Frederic John Walker included the creeping fire. Two anti-submarine ships were needed for this ( normally sloops or corvettes ). The “ target embark ” tracked the target submarine on ASDIC from a side about 1500 to 2000 yards behind the submarine. The second embark, with her ASDIC turned off and running at 5 knots, started an attack from a position between the directing transport and the target. This attack was controlled by radio telephone from the directing embark, based on their ASDIC and the range ( by rangefinder ) and charge of the attacking transport. a soon as the depth charges had been released, the attacking ship left the immediate area at full accelerate. The directing ship then entered the aim area and besides released a radiation pattern of depth charges. The humble speed of the access meant the submarine could not predict when depth charges were going to be released. Any evasive legal action was detected by the directing transport and steering orders to the attacking ship given accordingly. The broken accelerate of the attack had the advantage that the german acoustic torpedo was not effective against a warship travelling then lento. A magnetic declination of the creeping attack was the “ plaster ” attack, in which three attacking ships working in a close line abreast were directed over the target by the directing ship. [ 15 ] The newly weapons to deal with the ASDIC blind spot were “ ahead-throwing weapons ”, such as Hedgehogs and subsequently Squids, which projected warheads at a target ahead of the attacker and still in ASDIC contact. These allowed a individual escort to make better aimed attacks on submarines. Developments during the war resulted in british ASDIC sets that used several unlike shapes of glow, continuously covering blind spots. late, acoustic torpedoes were used. early in World War II ( September 1940 ), british ASDIC technology was transferred for exempt to the United States. Research on ASDIC and submerged heavy was expanded in the UK and in the US. many raw types of military voice detection were developed. These included sonobuoys, first developed by the british in 1944 under the codename High Tea, dipping/dunking sonar and mine -detection sonar. This exploit formed the basis for post-war developments related to countering the nuclear submarine .
sonar
During the 1930s american engineers developed their own submerged sound-detection technology, and authoritative discoveries were made, such as the universe of thermoclines and their effects on phone waves. [ 16 ] Americans began to use the term SONAR for their systems, coined by Frederick Hunt to be the equivalent of RADAR. [ 17 ]
US Navy Underwater Sound Laboratory
In 1917, the US Navy acquired J. Warren Horton ‘s services for the first time. On leave from Bell Labs, he served the government as a technical technical, first at the experimental station at Nahant, Massachusetts, and later at US Naval Headquarters, in London, England. At Nahant he applied the newly developed vacuum tube, then associated with the formative stages of the field of apply skill immediately known as electronics, to the detection of submerged signals. As a resultant role, the carbon button microphone, which had been used in earlier signal detection equipment, was replaced by the precursor of the modern hydrophone. besides during this period, he experimented with methods for towing detection. This was ascribable to the increased sensitivity of his device. The principles are hush used in modern towed sonar systems. To meet the defense needs of Great Britain, he was sent to England to install in the irish Sea bottom-mounted hydrophones connected to a shore listening mail by submarine cable. While this equipment was being loaded on the cable-laying vessel, World War I ended and Horton returned home. During World War II, he continued to develop sonar systems that could detect submarines, mines, and torpedoes. He published Fundamentals of Sonar in 1957 as chief inquiry adviser at the US Navy Underwater Sound Laboratory. He held this status until 1959 when he became technical director, a position he held until mandate retirement in 1963. [ 18 ] [ 19 ]
Materials and designs in the US and Japan
There was short advancement in US sonar from 1915 to 1940. In 1940, US sonars typically consisted of a magnetostrictive transducer and an array of nickel tubes connected to a 1-foot-diameter steel plate attached back-to-back to a Rochelle strategic arms limitation talks quartz glass in a spherical house. This assembly penetrated the ship hull and was manually rotated to the desired slant. The piezoelectric Rochelle salt quartz glass had better parameters, but the magnetostrictive unit was much more authentic. high losses to US merchant supply shipping early on in World War II led to large scale high priority US research in the field, pursuing both improvements in magnetostrictive transducer parameters and Rochelle salt dependability. Ammonium dihydrogen phosphate ( ADP ), a lake superior alternative, was found as a successor for Rochelle salt ; the first base application was a replacement of the 24 kilohertz Rochelle-salt transducers. Within nine months, Rochelle strategic arms limitation talks was disused. The ADP manufacture facility grew from few twelve personnel in early 1940 to several thousands in 1942. One of the earliest application of ADP crystals were hydrophones for acoustic mines ; the crystals were specified for low-frequency shortcut at 5 Hz, withstanding mechanical shock absorber for deployment from aircraft from 3,000 meter ( 10,000 foot ), and ability to survive neighbor mine explosions. One of key features of ADP dependability is its zero aging characteristics ; the crystal keeps its parameters flush over elongated storage. Another lotion was for acoustic home torpedoes. Two pairs of directing hydrophones were mounted on the torpedo nose, in the horizontal and erect plane ; the deviation signals from the pairs were used to steer the torpedo left-right and up-down. A countermeasure was developed : the target submarine discharged an effervescent chemical, and the bomber went after the noisy fizzing decoy. The counter-countermeasure was a bomber with active sonar – a transducer was added to the electric ray nose, and the microphones were listening for its reflect periodic tone bursts. The transducers comprised identical rectangular crystal plates arranged to diamond-shaped areas in stagger rows. passive sonar arrays for submarines were developed from ADP crystals. respective crystal assemblies were arranged in a steel tube, vacuum-filled with caster petroleum, and sealed. The tubes then were mounted in twin arrays. The criterion US Navy scanning sonar at the end of World War II operated at 18 kilohertz, using an array of ADP crystals. Desired longer crop, however, required use of lower frequencies. The needed dimensions were excessively big for ADP crystals, so in the early 1950s magnetostrictive and barium titanate piezoelectric systems were developed, but these had problems achieving uniform electric resistance characteristics, and the radio beam practice suffered. Barium titanate was then replaced with more stable go zirconate titanate ( PZT ), and the frequency was lowered to 5 kilohertz. The US flit used this material in the AN/SQS-23 sonar for several decades. The SQS-23 sonar beginning used magnetostrictive nickel transducers, but these weighed respective tons, and nickel was expensive and considered a critical material ; piezoelectric transducers were consequently substituted. The sonar was a large align of 432 individual transducers. At inaugural, the transducers were treacherous, showing mechanical and electrical failures and deteriorating soon after initiation ; they were besides produced by several vendors, had different designs, and their characteristics were different adequate to impair the array ‘s performance. The policy to allow repair of individual transducers was then sacrificed, and “ expendable modular plan ”, sealed non-repairable modules, was chosen rather, eliminating the trouble with seals and other external mechanical parts. [ 20 ] The Imperial Japanese Navy at the onset of World War II used projectors based on quartz. These were adult and fleshy, specially if designed for lower frequencies ; the one for type 91 typeset, operating at 9 kilohertz, had a diameter of 30 inches ( 760 millimeter ) and was driven by an oscillator with 5 kW power and 7 kilovolt of output amplitude. The Type 93 projectors consisted of solid sandwiches of quartz, assembled into ball-shaped cast iron bodies. The Type 93 sonars were later replaced with Type 3, which followed German design and used magnetostrictive projectors ; the projectors consisted of two orthogonal identical mugwump units in a cast iron orthogonal body about 16 by 9 inches ( 410 millimeter × 230 millimeter ). The expose area was half the wavelength wide and three wavelengths high. The magnetostrictive cores were made from 4 millimeter stampings of nickel, and late of an iron-aluminium alloy with aluminum content between 12.7 % and 12.9 %. The power was provided from a 2 kilowatt at 3.8 kV, with polarization from a 20 V, 8 A DC generator. The passive voice hydrophones of the Imperial japanese Navy were based on moving-coil design, Rochelle salt piezo transducers, and carbon microphones. [ 21 ]
late developments in transducers
Magnetostrictive transducers were pursued after World War II as an alternate to piezoelectric ones. Nickel scroll-wound ring transducers were used for high-power low-frequency operations, with size up to 13 feet ( 4.0 m ) in diameter, probably the largest individual sonar transducers ever. The advantage of metals is their high tensile forte and low stimulation electric electric resistance, but they have electrical losses and lower coupling coefficient than PZT, whose tensile potency can be increased by prestressing. early materials were besides tried ; nonmetallic ferrites were promising for their gloomy electric conduction resulting in depleted eddy current losses, Metglas offered high copulate coefficient, but they were inferior to PZT overall. In the 1970s, compounds of rare earths and iron were discovered with superscript magnetomechanic properties, namely the Terfenol-D debase. This made possible new designs, e.g. a hybrid magnetostrictive-piezoelectric transducer. The most late of these improved magnetostrictive materials is Galfenol. other types of transducers include variable-reluctance ( or moving-armature, or electromagnetic ) transducers, where magnetic pull acts on the surfaces of gaps, and moving coil ( or electrodynamic ) transducers, similar to conventional speakers ; the latter are used in submerged fathom calibration, due to their very abject plangency frequencies and flat broadband characteristics above them. [ 22 ]
active sonar
 principle of an active sonar active sonar uses a sound vector ( or projector ) and a receiver. When the two are in the same place it is monostatic operation. When the vector and recipient are separated it is bistatic operation. [ 23 ] When more transmitters ( or more receivers ) are used, again spatially separated, it is multistatic operation. Most sonars are used monostatically with the same array frequently being used for transmission and reception. [ 24 ] active agent sonobuoy fields may be operated multistatically. active sonar creates a pulse of sound, frequently called a “ ping ”, and then listens for reflections ( echo ) of the pulse. This pulsation of sound is generally created electronically using a sonar projector consisting of a signal generator, power amplifier and electro-acoustic transducer/array. [ 25 ] A transducer is a device that can transmit and receive acoustic signals ( “ pings ” ). A beamformer is normally employed to concentrate the acoustic might into a glow, which may be swept to cover the compulsory search angles. broadly, the electro-acoustic transducers are of the Tonpilz type and their plan may be optimised to achieve utmost efficiency over the widest bandwidth, in order to optimise operation of the overall system. occasionally, the acoustic pulse may be created by other means, e.g. chemically using explosives, airguns or plasma sound sources. To measure the distance to an object, the meter from transmission of a pulsate to reception is measured and converted into a range using the known rush of sound. [ 26 ] To measure the digest, several hydrophones are used, and the stage set measures the relative arrival time to each, or with an range of hydrophones, by measuring the relative amplitude in beam formed through a process called beamforming. Use of an align reduces the spatial response so that to provide wide cover multibeam systems are used. The target signal ( if deliver ) together with noise is then passed through diverse forms of signal serve, [ 27 ] which for elementary sonars may be just energy measurement. It is then presented to some shape of decisiveness device that calls the output signal either the ask signal or noise. This decision device may be an operator with headphones or a display, or in more sophisticate sonars this function may be carried out by software. far processes may be carried out to classify the aim and place it, arsenic well as measuring its speed. The pulse may be at ceaseless frequency or a tweedle of changing frequency ( to allow pulse compression on reception ). elementary sonars generally use the early with a filter broad enough to cover potential Doppler changes due to target movement, while more complex ones broadly include the latter technique. Since digital serve became available pulse compression has normally been implemented using digital correlation techniques. military sonars much have multiple beams to provide all-around cover while dim-witted ones only cover a constrict discharge, although the balance beam may be rotated, relatively slowly, by mechanical scan. peculiarly when single frequency transmissions are used, the Doppler effect can be used to measure the radial travel rapidly of a target. The difference in frequency between the air and welcome sign is measured and converted into a speed. Since Doppler shifts can be introduced by either liquidator or target motion, allowance has to be made for the radial speed of the searching platform. One useful small sonar is like in appearance to a rainproof flashlight. The head is pointed into the water, a push button is pressed, and the device displays the distance to the target. Another variant is a “ fishfinder “ that shows a little display with shoals of fish. Some civilian sonars ( which are not designed for stealth ) set about active military sonars in capability, with cubic displays of the area near the boat. When active sonar is used to measure the distance from the transducer to the bottom, it is known as echo voice. similar methods may be used looking up for wave measurement. active sonar is besides used to measure distance through water between two sonar transducers or a combination of a hydrophone ( submerged acoustic microphone ) and projector ( subaqueous acoustic loudspeaker ). When a hydrophone/transducer receives a specific question signal it responds by transmitting a specific answer signal. To measure distance, one transducer/projector transmits an question signal and measures the time between this infection and the reception of the other transducer/hydrophone answer. The time deviation, scaled by the amphetamine of sound through water and divided by two, is the distance between the two platforms. This technique, when used with multiple transducers/hydrophones/projectors, can calculate the proportional positions of static and moving objects in body of water. In battle situations, an active agent pulse can be detected by an enemy and will reveal a submarine ‘s put at twice the maximum distance that the submarine can itself detect a contact and give clues as to the submarines identity based on the characteristics of the outgoing ping. For these reasons, active sonar is not frequently used by military submarines. A identical directional, but low-efficiency, type of sonar ( used by fisheries, military, and for port security ) makes use of a complex nonlinear feature of water known as non-linear sonar, the virtual transducer being known as a parametric array .
principle of an active sonar active sonar uses a sound vector ( or projector ) and a receiver. When the two are in the same place it is monostatic operation. When the vector and recipient are separated it is bistatic operation. [ 23 ] When more transmitters ( or more receivers ) are used, again spatially separated, it is multistatic operation. Most sonars are used monostatically with the same array frequently being used for transmission and reception. [ 24 ] active agent sonobuoy fields may be operated multistatically. active sonar creates a pulse of sound, frequently called a “ ping ”, and then listens for reflections ( echo ) of the pulse. This pulsation of sound is generally created electronically using a sonar projector consisting of a signal generator, power amplifier and electro-acoustic transducer/array. [ 25 ] A transducer is a device that can transmit and receive acoustic signals ( “ pings ” ). A beamformer is normally employed to concentrate the acoustic might into a glow, which may be swept to cover the compulsory search angles. broadly, the electro-acoustic transducers are of the Tonpilz type and their plan may be optimised to achieve utmost efficiency over the widest bandwidth, in order to optimise operation of the overall system. occasionally, the acoustic pulse may be created by other means, e.g. chemically using explosives, airguns or plasma sound sources. To measure the distance to an object, the meter from transmission of a pulsate to reception is measured and converted into a range using the known rush of sound. [ 26 ] To measure the digest, several hydrophones are used, and the stage set measures the relative arrival time to each, or with an range of hydrophones, by measuring the relative amplitude in beam formed through a process called beamforming. Use of an align reduces the spatial response so that to provide wide cover multibeam systems are used. The target signal ( if deliver ) together with noise is then passed through diverse forms of signal serve, [ 27 ] which for elementary sonars may be just energy measurement. It is then presented to some shape of decisiveness device that calls the output signal either the ask signal or noise. This decision device may be an operator with headphones or a display, or in more sophisticate sonars this function may be carried out by software. far processes may be carried out to classify the aim and place it, arsenic well as measuring its speed. The pulse may be at ceaseless frequency or a tweedle of changing frequency ( to allow pulse compression on reception ). elementary sonars generally use the early with a filter broad enough to cover potential Doppler changes due to target movement, while more complex ones broadly include the latter technique. Since digital serve became available pulse compression has normally been implemented using digital correlation techniques. military sonars much have multiple beams to provide all-around cover while dim-witted ones only cover a constrict discharge, although the balance beam may be rotated, relatively slowly, by mechanical scan. peculiarly when single frequency transmissions are used, the Doppler effect can be used to measure the radial travel rapidly of a target. The difference in frequency between the air and welcome sign is measured and converted into a speed. Since Doppler shifts can be introduced by either liquidator or target motion, allowance has to be made for the radial speed of the searching platform. One useful small sonar is like in appearance to a rainproof flashlight. The head is pointed into the water, a push button is pressed, and the device displays the distance to the target. Another variant is a “ fishfinder “ that shows a little display with shoals of fish. Some civilian sonars ( which are not designed for stealth ) set about active military sonars in capability, with cubic displays of the area near the boat. When active sonar is used to measure the distance from the transducer to the bottom, it is known as echo voice. similar methods may be used looking up for wave measurement. active sonar is besides used to measure distance through water between two sonar transducers or a combination of a hydrophone ( submerged acoustic microphone ) and projector ( subaqueous acoustic loudspeaker ). When a hydrophone/transducer receives a specific question signal it responds by transmitting a specific answer signal. To measure distance, one transducer/projector transmits an question signal and measures the time between this infection and the reception of the other transducer/hydrophone answer. The time deviation, scaled by the amphetamine of sound through water and divided by two, is the distance between the two platforms. This technique, when used with multiple transducers/hydrophones/projectors, can calculate the proportional positions of static and moving objects in body of water. In battle situations, an active agent pulse can be detected by an enemy and will reveal a submarine ‘s put at twice the maximum distance that the submarine can itself detect a contact and give clues as to the submarines identity based on the characteristics of the outgoing ping. For these reasons, active sonar is not frequently used by military submarines. A identical directional, but low-efficiency, type of sonar ( used by fisheries, military, and for port security ) makes use of a complex nonlinear feature of water known as non-linear sonar, the virtual transducer being known as a parametric array .

project Artemis
project Artemis was an experimental inquiry and development stick out in the late 1950s to mid 1960s to examine acoustic generation and bespeak process for a low-frequency active sonar organization that might be used for ocean surveillance. A secondary objective was examen of engineer problems of fixed active bottom systems. [ 28 ] The receiving array was located on the slope of Plantagnet Bank off Bermuda. The active beginning array was deployed from the convert World War II oil tanker USNS Mission Capistrano. [ 29 ] Elements of Artemis were used experimentally after the independent experiment was terminated .
transponder
This is an active sonar device that receives a particular stimulation and immediately ( or with a delay ) retransmits the receive signal or a predetermine one. Transponders can be used to remotely activate or recover subsea equipment. [ 30 ]
performance prediction
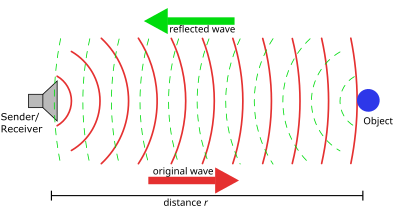
A sonar prey is minor relative to the sphere, centred around the emitter, on which it is located. consequently, the power of the reflect signal is very low, respective orders of magnitude less than the original sign. even if the reflected signal was of the same power, the follow exercise ( using hypothetical values ) shows the problem : Suppose a sonar arrangement is capable of emitting a 10,000 W/m2 signal at 1 meter, and detecting a 0.001 W/m2 signal. At 100 thousand the signal will be 1 W/m2 ( ascribable to the inverse-square police ). If the entire signal is reflected from a 10 m2 target, it will be at 0.001 W/m2 when it reaches the emitter, i.e. just detectable. however, the original signal will remain above 0.001 W/m2 until 3000 m. Any 10 m2 target between 100 and 3000 megabyte using a similar or better system would be able to detect the pulse, but would not be detected by the emitter. The detectors must be identical sensible to pick up the echoes. Since the original signal is a lot more brawny, it can be detected many times further than twice the range of the sonar ( as in the example ). active sonar have two performance limitations : due to noise and echo. In general, one or other of these will dominate, so that the two effects can be initially considered individually. In noise-limited conditions at initial signal detection : [ 31 ]
- SL − 2PL + TS − (NL − AG) = DT,
where SL is the source level, PL is the propagation passing ( sometimes referred to as infection loss ), TS is the target potency, NL is the randomness charge, AG is the array profit of the receive align ( sometimes approximated by its directivity index ) and DT is the detection brink. In reverberation-limited conditions at initial detection ( neglect array profit ) :
- SL − 2PL + TS = RL + DT,
where RL is the echo tied, and the other factors are as before .
Hand-held sonar for use by a diver
- The LIMIS (limpet mine imaging sonar) is a hand-held or ROV-mounted imaging sonar for use by a diver. Its name is because it was designed for patrol divers (combat frogmen or clearance divers) to look for limpet mines in low visibility water.
- The LUIS (lensing underwater imaging system) is another imaging sonar for use by a diver.
- There is or was a small flashlight-shaped handheld sonar for divers, that merely displays range.
- For the INSS (integrated navigation sonar system)
Upward looking sonar
An up looking sonar ( ULS ) is a sonar device pointed upwards looking towards the surface of the sea. It is used for similar purposes as down looking sonar, but has some unique applications such as measuring ocean ice rink thickness, roughness and concentration, [ 32 ] [ 33 ] or measuring air entrainment from bubble plumes during rough seas. Often it is moored on the bottom of the ocean or floats on a taut line mooring at a changeless depth of possibly 100 m. They may besides be used by submarines, AUVs, and floats such as the Argo ice-cream soda. [ 34 ]
passive sonar
passive sonar listens without transmitting. It is often employed in military settings, although it is besides used in science applications, e.g., detecting fish for presence/absence studies in respective aquatic environments – visualize besides passive voice acoustics and passive voice radar. In the very broadest usage, this condition can encompass about any analytic technique involving remotely generated voice, though it is normally restricted to techniques applied in an aquatic environment .
Identifying sound sources
passive voice sonar has a wide-eyed assortment of techniques for identifying the reservoir of a detect healthy. For example, U.S. vessels normally operate 60 Hz alternating current office systems. If transformers or generators are mounted without proper shaking insulation from the hull or become flooded, the 60 Hz fathom from the windings can be emitted from the submarine or ship. This can help to identify its nationality, as all European submarines and about every other state ‘s submarine have 50 Hz office systems. Intermittent sound sources ( such as a twist being dropped ), called “ transients, ” may besides be detectable to passive sonar. Until fairly recently, [ when? ] an experienced, trained operator identified signals, but now computers may do this. passive sonar systems may have big sonic databases, but the sonar operator normally ultimately classifies the signals manually. A computer system frequently uses these databases to identify classes of ships, actions ( i.e. the rush of a ship, or the type of weapon released ), and even detail ships .
noise limitations
passive sonar on vehicles is normally badly restrict because of noise generated by the fomite. For this reason, many submarines operate nuclear reactors that can be cooled without pumps, using dumb convection, or fuel cells or batteries, which can besides run mutely. Vehicles ‘ propellers are besides designed and precisely machined to emit minimal noise. high-speed propellers much create bantam bubbles in the water system, and this cavitation has a distinct strait. The sonar hydrophones may be towed behind the ship or bomber in order to reduce the effect of make noise generated by the watercraft itself. Towed units besides combat the thermocline, as the unit of measurement may be towed above or below the thermocline. The display of most passive sonars used to be a planar waterfall display. The horizontal direction of the display is bearing. The vertical is frequency, or sometimes time. Another display technique is to color-code frequency-time information for have a bun in the oven. More recent displays are generated by the computers, and mimic radar -type plan position indicator displays .
performance prediction
Unlike active sonar, merely one-way propagation is involved. Because of the different signal processing used, the minimal detectable signal-to-noise ratio proportion will be different. The equation for determining the performance of a passive sonar is [ 35 ] [ 31 ]
- SL − PL = NL − AG + DT,
where SL is the source level, PL is the propagation passing, NL is the noise charge, AG is the array gain and DT is the signal detection threshold. The figure of merit of a passive sonar is
- FOM = SL + AG − (NL + DT).
operation factors
The detection, classification and localization of function operation of a sonar depends on the environment and the welcome equipment, a well as the transmitting equipment in an active agent sonar or the target radiated noise in a passive sonar .
sound propagation
Sonar operation is affected by variations in sound speed, peculiarly in the erect plane. fathom travels more lento in fresh water than in sea water, though the deviation is small. The speed is determined by the water ‘s bulk modulus and bulk concentration. The bulk modulus is affected by temperature, dissolved impurities ( normally salt ), and press. The density effect is belittled. The travel rapidly of sound ( in feet per moment ) is approximately :
- 4388 + (11.25 × temperature (in °F)) + (0.0182 × depth (in feet)) + salinity (in parts-per-thousand ).
This empirically derived estimate equality is reasonably accurate for normal temperatures, concentrations of brininess and the rate of most ocean depths. Ocean temperature varies with depth, but at between 30 and 100 meters there is frequently a mark change, called the thermocline, dividing the warm surface water from the cold, hush waters that make up the rest of the ocean. This can frustrate sonar, because a sound originating on one side of the thermocline tends to be deflect, or refracted, through the thermocline. The thermocline may be confront in shallower coastal waters. however, wave military action will often mix the water column and eliminate the thermocline. Water blackmail besides affects sound generation : higher pressure increases the sound accelerate, which causes the sound waves to refract away from the area of higher sound speed. The mathematical model of deflection is called Snell ‘s police. If the audio source is deep and the conditions are right, propagation may occur in the ‘ deep sound groove ‘. This provides highly low propagation loss to a liquidator in the channel. This is because of sound trap in the channel with no losses at the boundaries. similar propagation can occur in the ‘surface duct ‘ under desirable conditions. however, in this case there are reflection losses at the surface. In shallow water propagation is broadly by repeated observation at the airfoil and bottomland, where considerable losses can occur. sound propagation is affected by preoccupation in the water itself adenine well as at the come on and bed. This absorption depends upon frequency, with several different mechanisms in ocean water. long-range sonar uses low frequencies to minimise absorption effects. The sea contains many sources of noise that intervene with the coveted target echo or signature. The main noise sources are waves and ship. The motion of the receiver through the urine can besides cause speed-dependent low frequency noise .
Scattering
When active sonar is used, scattering occurs from small objects in the ocean arsenic well as from the bottom and surface. This can be a major source of intervention. This acoustic scatter is analogous to the scatter of the light from a car ‘s headlights in fog : a high-intensity pencil beam will penetrate the obscure to some extent, but broader-beam headlights emit much ignite in undesirable directions, much of which is scattered back to the observer, overwhelming that reflected from the target ( “ white-out ” ). For analogous reasons active sonar needs to transmit in a narrow beam to minimize scattering .
 [36] bubble clouds shown under the sea. From referee. The scattering of sonar from objects ( mines, pipelines, zooplankton, geological features, fish etc. ) is how active sonar detects them, but this ability can be masked by strong spread from false targets, or ‘clutter ‘. Where they occur ( under breaking waves ; [ 37 ] in ship wakes ; in accelerator emitted from ocean floor seeps and leaks [ 38 ] etc. ), accelerator bubbles are knock-down sources of clutter, and can readily shroud targets. TWIPS ( Twin Inverted Pulse Sonar ) [ 39 ] [ 40 ] [ 41 ] is presently the lone sonar that can overcome this clutter trouble .
[36] bubble clouds shown under the sea. From referee. The scattering of sonar from objects ( mines, pipelines, zooplankton, geological features, fish etc. ) is how active sonar detects them, but this ability can be masked by strong spread from false targets, or ‘clutter ‘. Where they occur ( under breaking waves ; [ 37 ] in ship wakes ; in accelerator emitted from ocean floor seeps and leaks [ 38 ] etc. ), accelerator bubbles are knock-down sources of clutter, and can readily shroud targets. TWIPS ( Twin Inverted Pulse Sonar ) [ 39 ] [ 40 ] [ 41 ] is presently the lone sonar that can overcome this clutter trouble . [39] Comparison of Standard Sonar and TWIPS in finding a prey in champagne body of water. Adapted from referee. This is important as many recent conflicts have occurred in coastal waters, and the inability to detect whether mines are salute or not introduce hazards and delays to military vessels, and besides to aid convoy and merchant shipping trying to support the region hanker after the dispute has ceased. [ 39 ]
[39] Comparison of Standard Sonar and TWIPS in finding a prey in champagne body of water. Adapted from referee. This is important as many recent conflicts have occurred in coastal waters, and the inability to detect whether mines are salute or not introduce hazards and delays to military vessels, and besides to aid convoy and merchant shipping trying to support the region hanker after the dispute has ceased. [ 39 ]
prey characteristics
The sound reflection characteristics of the target of an active sonar, such as a submarine, are known as its target potency. A complicatedness is that echoes are besides obtained from other objects in the sea such as whales, wakes, schools of pisces and rocks. passive voice sonar detects the target ‘s radiated noise characteristics. The radiate spectrum comprises a continuous spectrum of noise with peaks at certain frequencies which can be used for classification .
Countermeasures
Active ( powered ) countermeasures may be launched by a submarine under fire to raise the noise grade, provide a large delusive target, and obscure the signature of the submarine itself.
Read more: What is the Maritime Industry?
Passive ( i, non-powered ) countermeasures include :
- Mounting noise-generating devices on isolating devices.
- Sound-absorbent coatings on the hulls of submarines, for example anechoic tiles.
military applications
Modern naval war makes extensive use of both passive and active sonar from water-borne vessels, aircraft and fixed installations. Although active agent sonar was used by surface craft in World War II, submarines avoided the use of active sonar due to the likely for revealing their presence and place to enemy forces. however, the advent of modern signal-processing enabled the use of passive sonar as a basal means for search and detection operations. In 1987 a class of japanese company Toshiba reportedly [ 42 ] sold machinery to the Soviet Union that allowed their submarine propeller blades to be milled indeed that they became radically quieter, making the newer generation of submarines more difficult to detect. The use of active sonar by a submarine to determine hold is highly rare and will not necessarily give high timbre bear or range information to the submarines fire control team. however, use of active sonar on surface ships is very common and is used by submarines when the tactical situation dictates it is more important to determine the status of a hostile submarine than conceal their own position. With surface ships, it might be assumed that the threat is already tracking the ship with satellite data as any vessel around the emitting sonar will detect the emission. Having heard the signal, it is easy to identify the sonar equipment used ( normally with its frequency ) and its position ( with the sound curl ‘s energy ). active sonar is alike to radar in that, while it allows detection of targets at a certain range, it besides enables the emitter to be detected at a far greater range, which is undesirable. Since active sonar reveals the presence and placement of the operator, and does not allow demand classification of targets, it is used by fast ( planes, helicopters ) and by noisy platforms ( most surface ships ) but rarely by submarines. When active agent sonar is used by surface ships or submarines, it is typically trip identical concisely at intermittent periods to minimize the hazard of detection. consequently, active agent sonar is normally considered a stand-in to passive sonar. In aircraft, active sonar is used in the form of disposable sonobuoys that are dropped in the aircraft ‘s patrol sphere or in the vicinity of possible enemy sonar contacts. passive sonar has respective advantages, most importantly that it is silent. If the prey radiated noise grade is high enough, it can have a greater range than active sonar, and allows the target to be identified. Since any motorize object makes some noise, it may in principle be detected, depending on the level of noise emitted and the ambient noise level in the area, ampere well as the engineering used. To simplify, passive sonar “ sees ” around the ship using it. On a submarine, nose-mounted passive sonar detects in directions of about 270°, centered on the ship ‘s alignment, the hull-mounted range of about 160° on each side, and the tow array of a full 360°. The inconspicuous areas are due to the ship ‘s own hindrance. once a signal is detected in a certain guidance ( which means that something makes sound in that direction, this is called broadband detection ) it is possible to zoom in and analyze the signal received ( narrowband analysis ). This is generally done using a Fourier translate to show the different frequencies making up the sound. Since every engine makes a specific reasoned, it is square to identify the object. Databases of singular engine sounds are part of what is known as acoustic intelligence or ACINT. Another use of passive sonar is to determine the target ‘s trajectory. This process is called target motion analysis ( TMA ), and the resultant “ solution ” is the aim ‘s range, course, and speed. TMA is done by marking from which direction the good comes at different times, and comparing the movement with that of the operator ‘s own ship. Changes in proportional gesticulate are analyzed using standard geometric techniques along with some assumptions about limiting cases. passive sonar is furtive and very utilitarian. however, it requires high-tech electronic components and is dearly-won. It is by and large deployed on expensive ships in the form of arrays to enhance detection. Surface ships use it to good effect ; it is even better used by submarines, and it is besides used by airplanes and helicopters, by and large to a “ storm consequence ”, since submarines can hide under thermal layers. If a bomber ‘s commanding officer believes he is alone, he may bring his boat close to the surface and be easier to detect, or go deeper and faster, and thus make more sound. Examples of sonar applications in military use are given below. Many of the civil uses given in the keep up section may besides be applicable to naval habit .
Anti-submarine war
 variable astuteness sonar and its winch Until recently, transport sonars were normally with hull mounted arrays, either amidships or at the bow. It was soon found after their initial habit that a entail of reducing flow noise was required. The first were made of canvas tent on a framework, then steel ones were used. now domes are normally made of reinforce fictile or pressurized rubber. such sonars are chiefly active in operation. An model of a conventional hull mounted sonar is the SQS-56. Because of the problems of ship noise, towed sonars are besides used. These have the advantage of being able to be placed deeper in the water, but have limitations on their habit in shallow urine. These are called tow arrays ( linear ) or variable depth sonars ( VDS ) with 2/3D arrays. A trouble is that the winches required to deploy/recover them are large and expensive. VDS sets are chiefly active in process, while towed arrays are passive. An exercise of a modern active-passive ship towed sonar is sonar 2087 made by Thales Underwater Systems .
variable astuteness sonar and its winch Until recently, transport sonars were normally with hull mounted arrays, either amidships or at the bow. It was soon found after their initial habit that a entail of reducing flow noise was required. The first were made of canvas tent on a framework, then steel ones were used. now domes are normally made of reinforce fictile or pressurized rubber. such sonars are chiefly active in operation. An model of a conventional hull mounted sonar is the SQS-56. Because of the problems of ship noise, towed sonars are besides used. These have the advantage of being able to be placed deeper in the water, but have limitations on their habit in shallow urine. These are called tow arrays ( linear ) or variable depth sonars ( VDS ) with 2/3D arrays. A trouble is that the winches required to deploy/recover them are large and expensive. VDS sets are chiefly active in process, while towed arrays are passive. An exercise of a modern active-passive ship towed sonar is sonar 2087 made by Thales Underwater Systems .
Torpedoes
Modern torpedoes are generally fitted with an active/passive sonar. This may be used to home directly on the target, but wake homing torpedoes are besides used. An early case of an acoustic homer was the Mark 37 bomber. Torpedo countermeasures can be towed or free. An early model was the german Sieglinde device while the Bold was a chemical device. A widely used US device was the tow AN/SLQ-25 Nixie while the mobile bomber simulator ( MOSS ) was a dislodge device. A modern option to the Nixie system is the UK Royal Navy S2170 Surface Ship Torpedo Defence organization .
Mines
Mines may be fitted with a sonar to detect, localize and recognize the command target. An model is the CAPTOR mine .
mine countermeasures
mine countermeasure ( MCM ) sonar, sometimes called “ mine and obstacle avoidance sonar ( MOAS ) ”, is a specialized character of sonar used for detecting belittled objects. Most MCM sonars are hull mounted but a few types are VDS design. An model of a hull mounted MCM sonar is the type 2193 while the SQQ-32 mine-hunting sonar and character 2093 systems are VDS designs .
Submarine navigation
Submarines trust on sonar to a greater extent than open ships as they can not use radar at depth. The sonar arrays may be hull mounted or towed. Information fitted on typical fits is given in Oyashio -class submarine and Swiftsure -class submarine .
aircraft
Helicopters can be used for antisubmarine war by deploying fields of active-passive sonobuoys or can operate dipping sonar, such as the AQS-13. Fixed wing aircraft can besides deploy sonobuoys and have greater survival and capacity to deploy them. Processing from the sonobuoys or dipping sonar can be on the aircraft or on transport. Dipping sonar has the advantage of being deployable to depths appropriate to daily conditions. Helicopters have besides been used for mine countermeasure missions using tow sonars such as the AQS-20A .
subaqueous communications
Dedicated sonars can be fitted to ships and submarines for submerged communication .
Ocean surveillance
The United States began a system of passive, cook ocean surveillance systems in 1950 with the classify name Sound Surveillance System ( SOSUS ) with American Telephone and Telegraph Company ( AT & T ), with its Bell Laboratories research and Western Electric manufacture entities being contracted for development and initiation. The systems exploited the SOFAR groove, besides known as the cryptic fathom channel, where a legal accelerate minimum creates a waveguide in which first gear frequency sound travels thousands of miles. analysis was based on an AT & T sound spectrogram, which converted audio into a ocular spectrogram representing a time–frequency analysis of sound that was developed for lecture analysis and modified to analyze low-frequency subaqueous sounds. That process was first gear Frequency Analysis and Recording and the equipment was termed the Low Frequency Analyzer and Recorder, both with the acronym LOFAR. LOFAR research was termed Jezebel and led to usage in breeze and open systems, particularly sonobuoys using the process and sometimes using “ Jezebel ” in their list. [ 43 ] [ 44 ] [ 45 ] [ 46 ] The propose system offered such predict of long-range bomber signal detection that the Navy ordered immediate moves for execution. [ 44 ] [ 47 ]
 Lofargram writers, one for each array beam, on a NAVFAC watch floor. Between facility of a trial align followed by a broad scale, forty component, prototype operational align in 1951 and 1958 systems were installed in the Atlantic and then the Pacific under the unclassified name Project Caesar. The original systems were terminated at classified shore stations designated Naval Facility ( NAVFAC ) explained as betroth in “ ocean inquiry ” to cover their relegate deputation. The system was upgraded multiple times with more advance cable television allowing the arrays to be installed in ocean basins and upgrade serve. The shore stations were eliminated in a serve of consolidation and rerouting the arrays to central serve centers into the 1990s. In 1985, with new fluid arrays and early systems becoming operational the corporate system list was changed to Integrated Undersea Surveillance System ( IUSS ). In 1991 the mission of the arrangement was declassified. The year before IUSS insignia were authorized for wear. Access was granted to some systems for scientific research. [ 43 ] [ 44 ] A exchangeable arrangement is believed to have been operated by the Soviet Union .
Lofargram writers, one for each array beam, on a NAVFAC watch floor. Between facility of a trial align followed by a broad scale, forty component, prototype operational align in 1951 and 1958 systems were installed in the Atlantic and then the Pacific under the unclassified name Project Caesar. The original systems were terminated at classified shore stations designated Naval Facility ( NAVFAC ) explained as betroth in “ ocean inquiry ” to cover their relegate deputation. The system was upgraded multiple times with more advance cable television allowing the arrays to be installed in ocean basins and upgrade serve. The shore stations were eliminated in a serve of consolidation and rerouting the arrays to central serve centers into the 1990s. In 1985, with new fluid arrays and early systems becoming operational the corporate system list was changed to Integrated Undersea Surveillance System ( IUSS ). In 1991 the mission of the arrangement was declassified. The year before IUSS insignia were authorized for wear. Access was granted to some systems for scientific research. [ 43 ] [ 44 ] A exchangeable arrangement is believed to have been operated by the Soviet Union .
Underwater security
sonar can be used to detect frogmen and other aqualung divers. This can be applicable around ships or at entrances to ports. active sonar can besides be used as a deterrent and/or disability mechanism. One such device is the Cerberus system .
 AN/PQS-2A hand-held sonar, shown with detachable flotation collar and magnetic compass
AN/PQS-2A hand-held sonar, shown with detachable flotation collar and magnetic compass
Hand-held sonar
Limpet mine imaging sonar ( LIMIS ) is a hand-held or ROV -mounted imaging sonar designed for patrol divers ( combat frogmen or headroom divers ) to look for limpet mines in depleted visibility water. The LUIS is another imaging sonar for practice by a loon. Integrated navigation sonar system ( INSS ) is a little flashlight-shaped hand-held sonar for divers that displays range. [ 48 ] [ 49 ]
Intercept sonar
This is a sonar designed to detect and locate the transmissions from hostile active sonars. An example of this is the character 2082 fitted on the british Vanguard -class submarines .
civilian applications
Fisheries
fish is an significant industry that is seeing growing need, but world catch tonnage is falling as a consequence of serious resource problems. The industry faces a future of continuing worldwide consolidation until a point of sustainability can be reached. however, the consolidation of the fish fleets are driving increased demands for sophisticated fish finding electronics such as sensors, sounders and sonars. Historically, fishermen have used many different techniques to find and harvest pisces. however, acoustic technology has been one of the most crucial repel forces behind the exploitation of the mod commercial fisheries. sound waves travel differently through fish than through water because a fish ‘s air-filled swim bladder has a different concentration than seawater. This concentration remainder allows the detection of schools of pisces by using reflected audio. Acoustic engineering is specially well suited for submerged applications since phone travels farther and faster subaqueous than in air. nowadays, commercial fishing vessels trust about wholly on acoustic sonar and sounders to detect fish. Fishermen besides use active sonar and echo healthy technology to determine water depth, bottom contour, and bottom typography .
 Cabin display of a fish finder sonar Companies such as eSonar, Raymarine, Marport Canada, Wesmar, Furuno, Krupp, and Simrad make a variety of sonar and acoustic instruments for the abstruse sea commercial fishing industry. For case, net sensors take assorted submerged measurements and transmit the information back to a receiver on dining table a vessel. Each detector is equipped with one or more acoustic transducers depending on its specific officiate. Data is transmitted from the sensors using radio acoustic telemetry and is received by a hull mounted hydrophone. The analogue signals are decoded and converted by a digital acoustic telephone receiver into data which is transmitted to a bridge calculator for graphic display on a high resolution admonisher .
Cabin display of a fish finder sonar Companies such as eSonar, Raymarine, Marport Canada, Wesmar, Furuno, Krupp, and Simrad make a variety of sonar and acoustic instruments for the abstruse sea commercial fishing industry. For case, net sensors take assorted submerged measurements and transmit the information back to a receiver on dining table a vessel. Each detector is equipped with one or more acoustic transducers depending on its specific officiate. Data is transmitted from the sensors using radio acoustic telemetry and is received by a hull mounted hydrophone. The analogue signals are decoded and converted by a digital acoustic telephone receiver into data which is transmitted to a bridge calculator for graphic display on a high resolution admonisher .
Echo sounding
Echo voice is a work used to determine the depth of water below ships and boats. A type of active sonar, echo looking is the infection of an acoustic pulse directly downwards to the ocean floor, measuring the time between infection and echo revert, after having hit the bottom and bouncing back to its ship of origin. The acoustic pulse is emitted by a transducer which receives the fall echo as well. The depth measurement is calculated by multiplying the speed of sound in water ( averaging 1,500 meters per second ) by the time between discharge and echo render. [ 50 ] [ 51 ] The value of submerged acoustics to the fish industry has led to the development of other acoustic instruments that operate in a like fashion to echo-sounders but, because their function is slenderly different from the initial model of the echo-sounder, have been given different terms .
net location
The net heavy is an repeat heavy with a transducer mounted on the headline of the final quite than on the bottom of the vessel. however, to accommodate the distance from the transducer to the expose unit, which is much greater than in a normal echo-sounder, several refinements have to be made. Two main types are available. The first gear is the cable type in which the signals are sent along a cable. In this event, there has to be the provision of a cable television barrel on which to haul, shoot and stow the cable during the different phases of the operation. The second type is the cable-less net-sounder – such as Marport ‘s Trawl Explorer – in which the signals are sent acoustically between the net and hull mounted receiver-hydrophone on the vessel. In this case, no cable television brake drum is required but sophisticated electronics are needed at the transducer and receiver. The display on a net reasoned shows the distance of the net from the bottomland ( or the airfoil ), rather than the depth of water as with the echo-sounder ‘s hull-mounted transducer. Fixed to the headline of the net income, the footrope can normally be seen which gives an indication of the net performance. Any fish passing into the net can besides be seen, allowing fine adjustments to be made to catch the most fish possible. In other fisheries, where the measure of fish in the net is significant, catch detector transducers are mounted at diverse positions on the cod-end of the web. As the cod-end fills up these get detector transducers are triggered one by one and this information is transmitted acoustically to display monitors on the bridge of the vessel. The skipper can then decide when to haul the net. modern versions of the final healthy, using multiple element transducers, function more like a sonar than an echo sounder and testify slices of the sphere in front of the net and not merely the vertical see that the initial net sounders used. The sonar is an echo-sounder with a directional capability that can show fish or early objects around the vessel .
ROV and UUV
modest sonars have been fitted to remotely engage vehicles ( ROVs ) and unmanned submerged vehicles ( UUVs ) to allow their operation in murky conditions. These sonars are used for looking ahead of the vehicle. The long-run Mine Reconnaissance System is a UUV for MCM purposes .
Vehicle localization
Sonars which act as beacons are fitted to aircraft to allow their location in the event of a crash in the sea. Short and long baseline sonars may be used for caring out the placement, such as LBL .
prosthesis for the visually afflicted
In 2013 an inventor in the United States unveiled a “ spider-sense ” bodysuit, equipped with supersonic sensors and haptic feedback systems, which alerts the wearer of incoming threats ; allowing them to respond to attackers tied when blindfolded. [ 52 ]
Scientific applications
Biomass estimate
signal detection of pisces, and other marine and aquatic life, and estimation their person sizes or sum biomass using active sonar techniques. As the sound pulsation travels through water it encounters objects that are of different concentration or acoustic characteristics than the surrounding metier, such as fish, that reflect sound back toward the phone beginning. These echoes provide information on fish size, location, abundance and behavior. Data is normally processed and analysed using a variety of software such as Echoview .
Wave measurement
An upward looking repeat legal mounted on the bottom or on a chopine may be used to make measurements of wave acme and period. From this statistics of the open conditions at a location can be derived .
Water speed measurement
extra short-circuit roll sonars have been developed to allow measurements of water system speed .
Bottom type assessment
Sonars have been developed that can be used to characterise the sea bottom into, for exemplar, mud, sand, and gravel. relatively simple sonars such as echo sounders can be promoted to seafloor classification systems via accessory modules, converting echo parameters into sediment type. Different algorithm exist, but they are all based on changes in the energy or form of the reflect sounder pings. Advanced substrate classification analysis can be achieved using calibrated ( scientific ) echosounders and parametric or fuzzy-logic analysis of the acoustic data .
Bathymetric function
Side-scan sonars can be used to derive maps of seafloor topography ( bathymetry ) by moving the sonar across it equitable above the buttocks. first gear frequency sonars such as GLORIA have been used for continental shelf wide surveys while high frequency sonars are used for more detailed surveys of smaller areas .
Sub-bottom profile
Powerful abject frequency echo-sounders have been developed for providing profiles of the amphetamine layers of the ocean bottom. One of the most recent devices is Innomar ‘s SES-2000 quattro multi-transducer parametric SBP, used for exemplar in the Puck Bay for subaqueous archaeological purposes [ 53 ]
Gas leak signal detection from the ocean floor
Gas bubbles can leak from the ocean floor, or conclude to it, from multiple sources. These can be detected by both passive voice [ 54 ] and active sonar [ 38 ] ( shown in conventional figure [ 54 ] by jaundiced and crimson systems respectively ) .
 [54] Active ( loss ) and passive ( yellow ) sonar signal detection of bubbles from seabed ( natural seeps and CCSF leaks ) and boast pipelines, taken from referee. natural seeps of methane and carbon dioxide happen. [ 38 ] Gas pipelines can leak, and it is significant to be able to detect whether escape occurs from Carbon Capture and Storage Facilities ( CCSFs ; e.g. depleted oil wells into which extracted atmospheric carbon paper is stored ). [ 55 ] [ 56 ] [ 57 ] [ 58 ] quantification of the come of gas leak is unmanageable, and although estimates can be made use active and passive sonar, it is important to question their accuracy because of the assumptions implicit in in making such estimations from sonar data. [ 54 ] [ 59 ]
[54] Active ( loss ) and passive ( yellow ) sonar signal detection of bubbles from seabed ( natural seeps and CCSF leaks ) and boast pipelines, taken from referee. natural seeps of methane and carbon dioxide happen. [ 38 ] Gas pipelines can leak, and it is significant to be able to detect whether escape occurs from Carbon Capture and Storage Facilities ( CCSFs ; e.g. depleted oil wells into which extracted atmospheric carbon paper is stored ). [ 55 ] [ 56 ] [ 57 ] [ 58 ] quantification of the come of gas leak is unmanageable, and although estimates can be made use active and passive sonar, it is important to question their accuracy because of the assumptions implicit in in making such estimations from sonar data. [ 54 ] [ 59 ]
synthetic aperture sonar
versatile synthetic aperture sonars have been built in the testing ground and some have entered use in mine-hunting and search systems. An explanation of their operation is given in man-made aperture sonar .
Parametric sonar
Parametric sources use the non-linearity of water to generate the difference frequency between two gamey frequencies. A virtual end-fire align is formed. Such a projector has advantages of across-the-board bandwidth, narrow beamwidth, and when in full developed and cautiously measured it has no obvious sidelobes : see parametric array. Its major disadvantage is identical depleted efficiency of merely a few percentage. [ 60 ] P.J. Westervelt summarizes the trends involved. [ 61 ]
Sonar in extraterrestrial being context
consumption of both passive voice and active sonar has been proposed for diverse extraterrestrial uses. [ 62 ] An example of the use of active sonar is in determining the depth of hydrocarbon seas on Titan, [ 63 ] An case of the habit of passive sonar is in the detection of methanefalls on Titan, [ 64 ] It has been noted that those proposals which suggest use of sonar without taking proper account of the difference between the Earthly ( atmosphere, ocean, mineral ) environments and the extraterrestrial being ones, can lead to erroneous values [ 65 ] [ 66 ] [ 67 ] [ 68 ] [ 69 ] [ 70 ]
ecological impact
impression on marine mammals
inquiry has shown that use of active sonar can lead to mass strandings of nautical mammals. [ 71 ] Beaked whales, the most park casualty of the strandings, have been shown to be highly sensitive to mid-frequency active sonar. [ 72 ] early marine mammals such as the amobarbital sodium whale besides flee away from the source of the sonar, [ 73 ] while naval activity was suggested to be the most probable cause of a mass strand of dolphins. [ 74 ] The US Navy, which part-funded some of the studies, said that the findings merely showed behavioral responses to sonar, not actual harm, but they “ will evaluate the potency of [ their ] marine mammal protective measures in light of new inquiry findings ”. [ 71 ] a 2008 US Supreme Court ruling on the habit of sonar by the US Navy noted that there had been no cases where sonar had been conclusively shown to have harmed or killed a marine mammal. [ 75 ] Some marine animals, such as whales and dolphins, use echolocation systems, sometimes called biosonar to locate predators and prey. inquiry on the effects of sonar on blue whales in the Southern California Bight shows that mid-frequency sonar use disrupts the whales ‘ feeding behavior. This indicates that sonar-induced disruption of feeding and supplanting from high-quality raven patches could have significant and previously undocumented impacts on whalebone whale foraging ecology, individual fitness and population health. [ 76 ] A review of tell on the mass strandings of beaked whale linked to naval exercises where sonar was used was published in 2019. It concluded that the effects of mid-frequency active sonar are strongest on Cuvier ‘s peck whales but vary among individuals or populations. The review suggested the military capability of response of person animals may depend on whether they had anterior exposure to sonar, and that symptoms of decompression illness have been found in strand whales that may be a solution of such reply to sonar. It noted that in the Canary Islands where multiple strandings had been previously reported, no more mass strandings had occurred once naval exercises during which sonar was used were banned in the area, and recommended that the prohibition be extended to other areas where mass strandings continue to occur. [ 77 ] [ 78 ]
effect on pisces
High-intensity sonar sounds can create a little irregular shift in the hearing threshold of some fish. [ 79 ] [ 80 ] [ a ]
Frequencies and resolutions
The frequencies of sonars range from infrasonic to above a megahertz. broadly, the lower frequencies have longer range, while the higher frequencies offer better resolution, and smaller size for a given directivity. To achieve reasonable directionality, frequencies below 1 kHz broadly require large size, normally achieved as tow arrays. [ 81 ] depleted frequency sonars are loosely defined as 1–5 kilohertz, albeit some navies regard 5–7 kilohertz besides deoxyadenosine monophosphate low frequency. Medium frequency is defined as 5–15 kilohertz. Another style of division considers low frequency to be under 1 kilohertz, and culture medium frequency at between 1–10 kHz. [ 81 ] american World War II earned run average sonars operated at a relatively senior high school frequency of 20–30 kHz, to achieve directionality with reasonably belittled transducers, with typical maximum functional image of 2500 yd. Postwar sonars used lower frequencies to achieve longer crop ; e.g. SQS-4 operated at 10 kilohertz with compass astir to 5000 yd. SQS-26 and SQS-53 operated at 3 kilohertz with image up to 20,000 yd ; their domes had size of approx. a 60-ft personnel boat, an upper size limit for conventional hull sonars. Achieving larger sizes by conformal sonar array circulate over the hull has not been effective so far, for lower frequencies linear or towed arrays are therefore used. [ 81 ] japanese WW2 sonars operated at a scope of frequencies. The type 91, with 30 edge quartz projector, worked at 9 kilohertz. The type 93, with smaller quartz glass projectors, operated at 17.5 kilohertz ( model 5 at 16 or 19 kHz magnetostrictive ) at powers between 1.7 and 2.5 kilowatts, with range of up to 6 kilometer. The later Type 3, with German-design magnetostrictive transducers, operated at 13, 14.5, 16, or 20 kHz ( by mannequin ), using twin transducers ( except mannequin 1 which had three single ones ), at 0.2 to 2.5 kilowatts. The childlike type used 14.5 kHz magnetostrictive transducers at 0.25 kilowatt, driven by capacitive discharge rather of oscillators, with rate up to 2.5 kilometer. [ 21 ] The sonar ‘s resolution is angular ; objects further apart are imaged with lower resolutions than nearby ones. Another generator lists ranges and resolutions vs frequencies for sidescan sonars. 30 kHz provides low resolving power with range of 1000–6000 m, 100 kilohertz gives culture medium resoluteness at 500–1000 thousand, 300 kilohertz gives high settlement at 150–500 m, and 600 kilohertz gives high resolution at 75–150 m. Longer range sonars are more adversely affected by nonhomogenities of water. Some environments, typically shoal waters near the coasts, have complicated terrain with many features ; higher frequencies become necessary there. [ 82 ]
See besides
explanatory notes
- ^ Halvorsen et aluminum. ( 2013 ) conclude that note effects were “ typically humble even though the fish were near the sonar and remained there for the full duration of three test signals ” .






