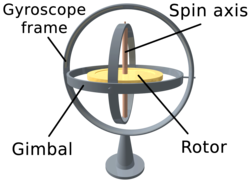
 Con quay hồi chuyển. Gyroscope frame : Khung con quay ; Gimbal : khớp vạn năng ; Rotor : đĩa quay ; Spin axis : trục quay
Con quay hồi chuyển. Gyroscope frame : Khung con quay ; Gimbal : khớp vạn năng ; Rotor : đĩa quay ; Spin axis : trục quayCon quay hồi chuyển là một thiết bị dùng để đo đạc hoặc duy trì phương hướng, dựa trên các nguyên tắc bảo toàn mô men động lượng.[1] Thực chất, con quay cơ học là một bánh xe hay đĩa quay với các trục quay tự do theo mọi hướng. Phương hướng này thay đổi nhiều hay ít tùy thuộc vào mô men xoắn bên ngoài hơn là liên quan đến con quay có vận tốc cao mà không cần mô men động lượng lớn. Vì mô men xoắn được tối thiểu hóa bởi việc gắn kết thiết bị trong các khớp vạn năng (gimbal), hướng của nó duy trì gần như cố định bất kể so với bất kỳ chuyển động nào của vật thể mà nó tựa lên.
Cũng có những con quay dựa trên những nguyên tắc quản lý và vận hành như những thiết bị điện, con quay MEMS vi mạch đóng gói được tìm thấy trên những thiết bị sử dụng điện, laser vòng trạng thái rắn, con quay sợi quang học, và con quay lượng tử siêu nhạy .
Các ứng dụng của con quay như các hệ định vị quán tính nơi mà la bàn từ không thể hoạt động (như trong kính thiên văn Hubble) hay không đạt đủ độ chính xác (như ICBM), hay đối với sự ổn định hóa của các thiết bị bay như máy bay trực thăng được điều khiển bằng tín hiệu radia hoặc máy bay không người lái. Do có độ chính xác cao, con quay cũng được dùng để định hướng trong khai thác mỏ hầm lò.[2]
Bạn đang đọc: Con quay hồi chuyển – Wikipedia tiếng Việt
 Con quay hồi chuyển hoạt động giải trí với cả ba trục tự do. Đĩa quay ( rotor ) sẽ giữ hướng trục quay của nó không nhờ vào vào khuynh hướng của khung ngoàiCon quay hồi chuyển đặc trưng bởi 1 số ít ứng xử như tiến động và chương động. Con quay hồi chuyển hoàn toàn có thể được sử dụng để làm la bàn con quay, loại bổ trợ hoặc sửa chữa thay thế la bàn từ ( trên tàu, máy bay và con thuyền khoảng trống ), để tương hỗ tính không thay đổi ( kính thiên văn Hubble, xe đạp điện, xe máy và tàu thuyền ) hoặc được sử dụng làm một bộ phận của hệ dẫn đường quán tính. Các hiệu ứng hồi chuyển được sử dụng trong boomerang, yo-yo, và PowerBall. Một số thiết bị quay khác như flywheel cũng có cách hoạt động giải trí giống con quay hồi chuyển, mặc dầu hiệu ứng hồi chuyển không được sử dụng .Phương trình cơ bản miêu tả ứng xử của con quay hồi chuyển :
Con quay hồi chuyển hoạt động giải trí với cả ba trục tự do. Đĩa quay ( rotor ) sẽ giữ hướng trục quay của nó không nhờ vào vào khuynh hướng của khung ngoàiCon quay hồi chuyển đặc trưng bởi 1 số ít ứng xử như tiến động và chương động. Con quay hồi chuyển hoàn toàn có thể được sử dụng để làm la bàn con quay, loại bổ trợ hoặc sửa chữa thay thế la bàn từ ( trên tàu, máy bay và con thuyền khoảng trống ), để tương hỗ tính không thay đổi ( kính thiên văn Hubble, xe đạp điện, xe máy và tàu thuyền ) hoặc được sử dụng làm một bộ phận của hệ dẫn đường quán tính. Các hiệu ứng hồi chuyển được sử dụng trong boomerang, yo-yo, và PowerBall. Một số thiết bị quay khác như flywheel cũng có cách hoạt động giải trí giống con quay hồi chuyển, mặc dầu hiệu ứng hồi chuyển không được sử dụng .Phương trình cơ bản miêu tả ứng xử của con quay hồi chuyển :
- τ = d L d t = d ( I ω ) d t = I α { \ displaystyle { \ boldsymbol { \ tau } } = { { d \ mathbf { L } } \ over { dt } } = { { d ( I { \ boldsymbol { \ omega } } ) } \ over { dt } } = I { \ boldsymbol { \ alpha } } }


với các vec-tơ τ và L tương ứng là mô men xoắn và mô men động lượng, đại lượng vô hướng I là mô men quán tính, vec-tơ ω là vận tốc góc, và vec-tơ α là gia tốc góc.
Theo phương trình trên, momen xoắn τ vuông góc với trục quay, và do vuông góc với L, nên tạo ra chuyển động quay quanh trục vuông góc với cả τ và L. Chuyển động này được gọi là tiến động. Vận tốc góc của tiến động ΩP được tính từ tích vectơ:
- τ = Ω P × L. { \ displaystyle { \ boldsymbol { \ tau } } = { \ boldsymbol { \ Omega } } _ { \ mathrm { P } } \ times \ mathbf { L }. }

Dưới một mô men xoắn có độ lớn không đổi τ, vận tốc tiến động của con quay ΩP tỉ lệ nghịch với L, độ lớn mô men động lượng của nó là:
τ
=Ω
P
L
sin
θ
,{\displaystyle \tau ={\mathit {\Omega }}_{\mathrm {P} }L\sin \theta ,\!}

với θ là góc giữa 2 vectơ ΩP và L. Do vậy, nếu con quay quay chậm lại (ví dụ như ảnh hưởng của masat), mô men động lượng của nó sẽ giảm và dẫn đến vận tốc tiến động tăng. Quá trình này cứ tiếp tục cho đến khi thiết bị không thể quay đủ nhanh để chịu được sức nặng của nó, khi nó dừng lại và rơi, chủ yếu là do masat chống lại tiến động gây ra bởi một tiến động khác.
Theo quy ước, 3 vectơ – mô men xoắn, quay và tiến động – hoạt động giải trí theo quy tắc bàn tay trái .Để thuận tiện xác lập được hướng của hiệu ứng con quay hồi chuyển, chỉ cần nhớ rằng một bánh xe lăn có khuynh hướng, khi nó nghiêng sang một bên, ngược lại với hướng nghiêng .
Liên kết ngoài[sửa|sửa mã nguồn]
Source: https://mindovermetal.org
Category: Ứng dụng hay